
УДК 711.11
к.т.н., професор Осетрін М.М.,
n.osetrin@gmail.com, ORCID:0000-0001-7015-4679,
Беспалов Д.О., dmitry.bespalov@me.com, ORCID: 0000-0002-0778-5627,
Дорош М.І., doroshmaxym@gmail.com, ORCID: 0000-0003-3717-9326,
к.т.н. Тарасюк В.П., tarasyuk90@gmail.com, ORCID: 0000-0003-4762-5668,
Київський національний університет будівництва та архітектури
ТРАНСПОРТНЕ МОДЕЛЮВАННЯ ЯК ОДИН ІЗ МЕТОДІВ ОЦІНКИ ЕФЕКТИВНОСТІ ІНЖЕНЕРНО-ПЛАНУВАЛЬНИХ ЕЛЕМЕНТІВ РОЗВ’ЯЗОК В РІЗНИХ РІВНЯХ
Стаття спрямована на ознайомлення читачів з оцінкою ефективності інженерно-планувальних елементів розв’язок в різних рівнях, а саме місць примикання лівоповоротних з’їздів до прямого магістрального напрямку. Відповідна оцінка здійснена на прикладі найбільш розповсюдженого типу розв’язок на вулично-дорожній мережі міст України – «лист конюшини».
Якість роботи транспортних розв’язок багато в чому визначається ефективністю функціонування лівоповоротних з’їздів та може бути визначена на основі транспортного моделювання. В зв’язку з цим для визначення впливу розподілу пріоритетних напрямків руху транспортних засобів у межах конфліктних зон місць примикання лівоповоротних з’їздів до прямих магістральних напрямків на середній час затримки транспорту було використане сучасне програмне забезпечення для мікромоделювання – PTV Vissim. Даний програмний комплекс працює на основі психофізіологічної моделі Відемана, що базується на стохастичному розподілі вхідного транспортного потоку. Функціонал комплексу дає можливість отримати різноманітні показники як для усієї розв’язки в цілому, так і будь-якого її структурного елементу окремо.
В результаті проведеного експерименту встановлено, що будь-який елемент розв’язки в різних рівнях, в тому числі примикання з’їзду до прямого магістрального напрямку, має свою граничну пропускну спроможність, в результаті вичерпання якої, середній час затримки транспорту збільшується до наближеного максимуму і не зменшується до розвантаження відповідного елемента. При цьому різні способи обмеження руху в конфліктних зонах (пріоритет прямого магістрального напрямку або взаємний конфлікт транспортних потоків) генерують різні показники середнього часу затримки в межах розв’язки в різних рівнях.
Ключові слова: транспортна розв’язка, елементи розв’язок в різних рівнях, транспортне моделювання, примикання з’їздів, модель Відемана.
Вступ. Розвиток вулично-дорожньої мережі (ВДМ) міст значно відстає від темпів зростання кількості транспортних засобів (ТЗ) в її межах. Це призводить до зниження ефективності використання транспорту [1] та погіршення основних оціночних показників його роботи, серед яких:
- зростання середнього часу затримок ТЗ;
- збільшення кількості незапланованих зупинок;
- зменшення швидкості руху;
- збільшення викидів шкідливих речовин;
- перевитрата палива і т.д.
Особливо гостро дані проблеми проявляються у вузлових пунктах ВДМ. Одним із способів їх вирішення є влаштування транспортних розв’язок в різних рівнях. При цьому варто враховувати, що параметри їх інженерно-планувальних елементів, визначають режим руху транспортного потоку (ТП) не лише в межах конкретного транспортного вузла, а на магістралі в цілому.
Транспортна розв’язка в різних рівнях представляє просторову структуру площ та перехресть, яка, з допомогою штучних споруд, дозволяє пропустити через вузол конфліктуючі потоки транспорту і пішоходів [2]. Ефективність її роботи, в основному, пояснюється розподілом прямих потоків ТЗ по вертикалі (зняття найбільш небезпечних конфліктних точок) й будівництвом спеціальних поворотних з’їздів [2]. В свою чергу, якість роботи з’їздів забезпечується ефективністю роботи їх примикань до прямих магістральних напрямків, що визначається розподілом пріоритетних напрямків руху ТЗ в межах конфліктних зон.
Постановка проблеми. Одним з основних показників, який характеризує ефективність роботи транспорту є середній час затримки ТЗ. Сьогодні існують різні способи його визначення в межах розв’язок в різних рівнях, але в даній роботі увага буде зосереджена на методі транспортного моделювання, побудованого на базі психофізіологічної моделі Відемана [4, 5]. Дана модель, в сукупності з сучасними комп’ютерними технологіями, дозволяє реалістично і точно створювати умови для оцінки та аналізу різних транспортних сценаріїв. Одним із прикладів її використання являється програмний продукт для транспортного моделювання – PTV Vissim, який і буде використовуватись в даному дослідженні.
Найбільш розповсюдженим типом розв’язок у різних рівнях на ВДМ міст України є «лист конюшини» [2], тому дана робота присвячена саме цьому типу міських дорожньо-транспортних споруд. Якість її роботи багато в чому визначається ефективністю функціонування лівоповоротних з’їздів та може бути визначена з допомогою транспортного моделювання.
Метою роботи є визначення впливу розподілу пріоритетних напрямків руху ТЗ у межах конфліктних зон місць примикання лівоповоротних з’їздів до прямих магістральних напрямків на середній час затримки ТЗ на основі моделі Відемана з допомогою програмного комплексу PTV Vissim. Предметом дослідження є середній час затримки ТЗ, а об’єктом – конфліктні зони примикань лівоповоротних з’їздів.
Аналіз останніх досліджень і публікацій. Питанням оцінки ефективності роботи елементів розв’язок в різних рівнях займалося багато як вітчизняних, так і закордонних науковців. Серед яких на особливу увагу заслуговують праці Гібшмана М.Е., Попова В. І., Гохмана В.А., Візгалова В.М., Полякова М.П., Сільянова В.В., Дрю Д. [6, 3, 7, 8] та інші.
Основна частина. Найбільш розповсюдженим програмним комплексом для моделювання в Європі та Америці є PTV Vissim, який дозволяє розробляти моделі дорожніх ситуацій на мікрорівні [9] та відображати взаємодію між різними учасниками дорожнього руху: легковими та вантажними ТЗ, громадським транспортом, велосипедами, мотоциклами, пішоходами. Моделювання руху ТП з допомогою PTV Vissim дає можливість отримати різноманітні оціночні показники як для усієї розв’язки в цілому, так і будь-якого її структурного елементу окремо, серед яких і середній час затримки ТЗ.
Розроблена у програмному комплексі PTV Vissim модель імітації руху транспорту побудована на основі часових інтервалів, в якій одиниця «водій – ТЗ» розглядається як найменша одиниця. Дана модель враховує психофізіологічну модель проходження за «лідером» по Відеману за допомогою реалізації параметрів, що базуються на стохастичному розподілі вхідного ТП.
Модель Відемана базується на припущенні, що водій може перебувати в одному з чотирьох наступних станів руху [10]:
- Вільна їзда: немає помітного впливу від ТЗ, що їдуть попереду. У цьому стані водій намагається досягти бажаної швидкості і зберегти її. При цьому бажана швидкість являє собою швидкість, з якою рухався б ТЗ, якби йому не перешкоджали інші ТЗ або елементи мережі (світлосигнальні установки, стоп-знаки та ін.). В реальності водію, як правило, не вдається утримувати швидкість постійною через неповний контроль над ТЗ. Швидкість постійно коливатиметься навколо бажаної швидкості.
- Зближення: це процес, при якому водій підлаштовує свою швидкість під швидкість більш повільного ТЗ, який рухається попереду. Під час зближення водій знижує швидкість таким чином, щоб в ідеальному випадку різниця швидкостей між ТЗ, що їде попереду і ним дорівнювала нулю, після досягнення безпечної дистанції.
- Слідування: водій їде за ТЗ, не здійснюючи усвідомленого гальмування або прискорення. При цьому він тримає відносно постійну дистанцію. Однак і тут, в результаті не зовсім досконалого управління педаллю газу, мають місце незначні коливання різниці швидкостей і, відповідно, дистанції між автомобілями.
- Гальмування: при зниженні бажаної безпечної дистанції застосовується гальмування з використанням середнього або сильного уповільнення. Це може відбуватися в тому випадку, якщо ТЗ, який рухається попереду раптово гальмує або третій ТЗ робить спробу зміни смуги руху в проміжок між цими ТЗ.
Для кожного з цих чотирьох станів руху прискорення випливає з актуальної швидкості, різниці швидкостей та відстані по відношенню до ТЗ, що рухається попереду, а також індивідуальних характеристик водія і ТЗ.
Водій перемикається з одного стану руху на інший, як тільки він досягає певного порогу, який може бути виражений як комбінація різниці швидкостей і дистанції між ТЗ. Таким чином, наприклад, незначна різниця швидкостей може сприйматися лише на незначній відстані. І навпаки, велика різниця в швидкості руху ТЗ спонукає водія до реакції вже на більшій дистанції. Різні водії по-різному розуміють бажані швидкості і безпечні дистанції, а також здатність сприймати різницю в швидкості. Тому комбінація психологічних аспектів і фізіологічних обмежень сприйняття дорожньої ситуації водіями ТЗ називається психофізіологічною моделлю проходження за «лідером» по Відеману.
Особливу важливість дана модель відіграє при розгляді розв’язок в різних рівнях, які є найбільш складними вузлами ВДМ міст, як з точки зору проектування, так і з точки зору їх будівництва і подальшої експлуатації. Вартість таких дорожньо-транспортних споруд досить висока. У зв’язку з цим питання створення сучасної технології і методів проектування перетинів і магістралей в різних рівнях є досить актуальним. Реалізація сучасної технології і методів їх проектування на базі використання новітніх комп’ютерних технологій, обладнаних необхідними периферійними пристроями, дозволяє отримувати найкращі проектні рішення при мінімальних витратах засобів і часу на проектування.
Найбільш складними і відповідальними місцями розв’язок руху в різних рівнях є зони відгалужень і примикань право- і лівоповоротних з’їздів з прямими магістральними напрямками (Рис.1).
Зона з’їздів транспортної розв’язки визначається положенням початку та кінця ділянок відгалуження.
Зона відгалуження – ділянка на з’їзді з магістралі від створу початку ділянки розширення перехідно-швидкісної смуги до створу кінця поділу кромок проїжджих частин.
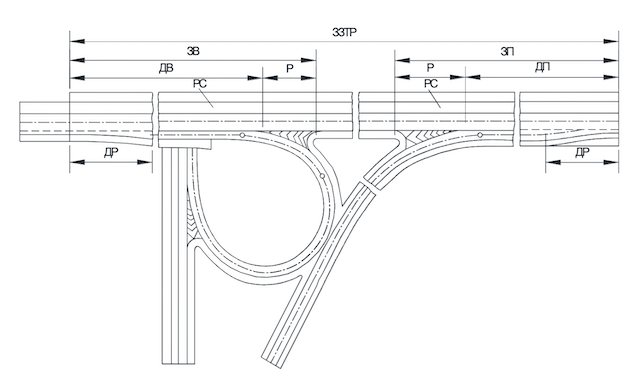
Рис. 1. Елементи розв’язки в різних рівнях на відгалуженнях і примиканнях:
ЗЗТР – зона з’їздів транспортної розв’язки; ЗВ – зона відгалуження; ДВ – ділянка відгалуження; ЗП – зона примикання; ДП – ділянка примикання; РС – розділова смуга; ДР – ділянка розширення; Р – ділянка розриву кромок і бортового каменю.
Зона примикання – ділянка на з’їзді на магістраль від створу кінця поділу кромок до створу початку відгону розширення перехідно-швидкісної смуги.
Ділянка відгалуження – ділянка на з’їзді з автомагістралі від створу початку відгону розширення перехідно-швидкісної смуги до створу початку поділу кромок.
Ділянка примикання – ділянка на з’їзді на магістраль від створу початку поділу кромок до створу початку ділянки розширення перехідно-швидкісної смуги.
Ділянка розширення – ділянка переходу від неуширеної проїзної частини автомагістралі до початку перехідно-швидкісної смуги повної ширини.
Ділянка розриву кромок і бортового каменю – ділянка з’їздів, в межах яких здійснюється розділення кромок і бортового каменю магістралі і сполучної рампи.
Принципи організації руху в межах ділянок примикань багато в чому визначають безпеку руху розв’язки в цілому. Адже саме в цих місцях виникає конфлікт ТЗ, які рухаються по прямому напрямку та ТЗ, які здійснюють поворотний маневр. Небезпечність цих зон пов’язана з різницею швидкостей руху основного потоку ТЗ, що виходять зі з’їзду [3]. В свою чергу PTV Vissim розглядає конфліктні зони, як елемент мережі, що використовується для впливу на конфлікти між ТЗ на відрізках через регулювання пріоритету проїзду [10]. Конфліктна зона вказує наступні конфліктні випадки:
- з пріоритетом проїзду (Рис. 2);
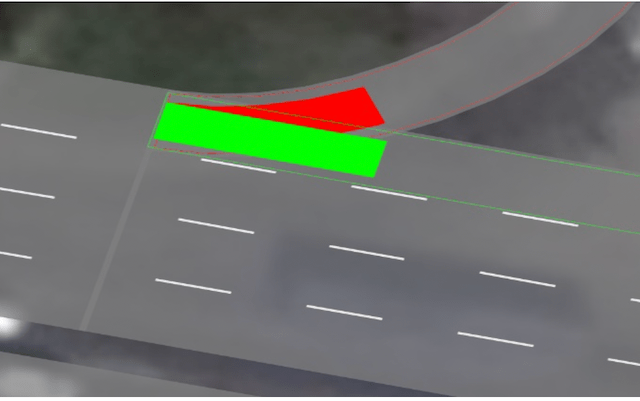 Рис. 2. Конфліктна зони пріоритету прямого магістрального напрямку
Рис. 2. Конфліктна зони пріоритету прямого магістрального напрямку
- взаємний конфлікт – використовується для розгалужень, щоб транспортні засоби «бачили» один одного але не конфліктували (Рис. 3);
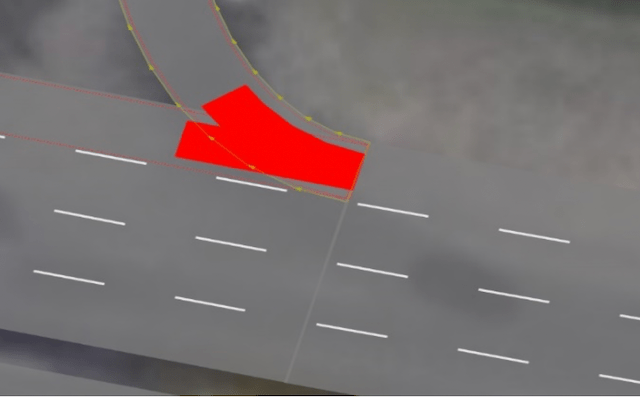 Рис. 3. Конфліктна зона взаємного конфлікту
Рис. 3. Конфліктна зона взаємного конфлікту
- пасивна конфліктна зона – без пріоритету проїзду (Рис. 4).
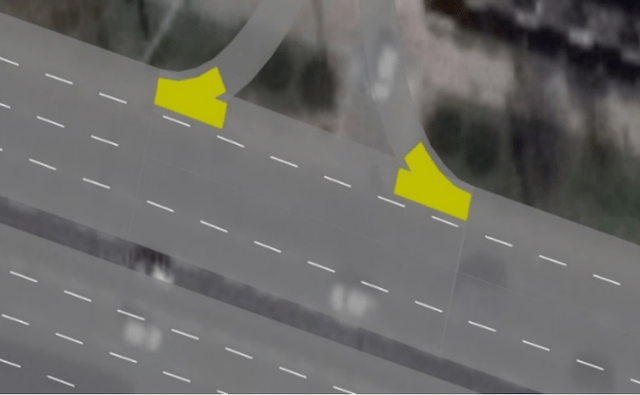 Рис. 4. Пасивна конфліктна зона
Рис. 4. Пасивна конфліктна зона
Ефективність роботи ділянок примикання залежить від інтенсивності ТП як на прямих, так і на поворотних напрямках. Для визначення впливу інтенсивності руху ТЗ та пріоритетності їх проїзду ділянки примикання з’їздів до прямого магістрального напрямку на середній час затримки ТЗ проведено експеримент. В його рамках, з допомогою програмного комплексу PTV Vissim, створено розрахункову модель ділянки примикання (Рис. 5).
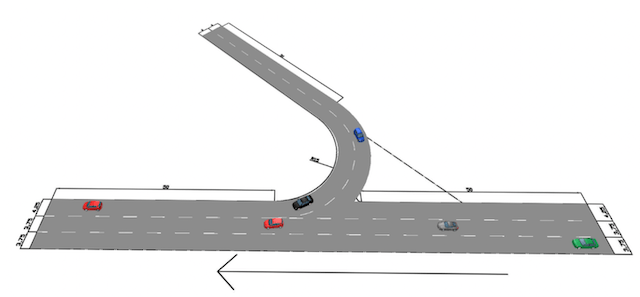 Рис. 5. Об’ємно-просторовий вигляд експериментальної ділянки в програмному комплексі PTV Vissim
Рис. 5. Об’ємно-просторовий вигляд експериментальної ділянки в програмному комплексі PTV Vissim
Задано наступні вихідні дані:
- примикання 2-х смугового з’їзду до 3-х смугового прямого магістрального напрямку;
- інтенсивність вхідного ТП на з’їзді – 100…1000 авт./год. (з кратністю 100 авт./год.);
- інтенсивність вхідного ТП на магістралі – 1000…10000 авт./год. (з кратністю 1000 авт./год.);
- кут примикання з’їзду – 45°, радіус – 15м.
Оскільки пасивні конфліктні зони не відображають реальних умов руху ТЗ в межах розв’язок в різних рівнях, то вони не досліджувалися. В рамках даного експерименту розроблено понад 200 моделей, умови руху ТЗ в яких відповідають наступним критеріям: за певний проміжок часу можна пропустити максимально можливу кількість ТЗ тільки в тому випадку, якщо всі вони будуть рухатися з однаковою швидкістю в колоні, підтримуючи між собою мінімально безпечну дистанцію. Ця дистанція повинна надати можливість безпечної зупинки в разі екстреного гальмування автомобіля, що рухається попереду [12, 13]. Тобто, якби всі ТЗ мали однакові гальмівні якості то, дистанція між ними могла б дорівнювати відстані, яку проходить автомобіль за час реакції водія [14, 12]. Однак в реальних умовах ТП складається з різнотипних автомобілів, що мають гальма різної ефективності. Тому величину безпечної дистанції визначають виходячи з припущення, що ТЗ, який рухається попереду має більш ефективну гальмівну систему і, отже, менший гальмівний шлях, ніж той, що рухається позаду.
В результаті моделювання отримано показники середнього часу затримки ТЗ в залежності від зміни інтенсивності руху транспорту на магістралі та примикаючому з’їзді (за умови пріоритетного руху ТП по магістралі та їх взаємних конфліктів) (Рис. 6, 7).
При наданні пріоритету руху ТП по магістралі встановлено, що:
- при інтенсивності руху транспорту на прямому напрямку в межах 1000…2000 авт./год. середній час затримки ТЗ в залежності від інтенсивності руху ТЗ на з’їзді, майже не змінюється (tзатр=2…4 с);
- при інтенсивності руху транспорту на прямому напрямку в межах 3000…6000 авт./год. показник середнього часу затримки ТЗ в залежності від інтенсивності руху ТЗ на з’їзді характеризується трьома змінами:
1. При інтенсивності руху ТЗ на з’їздах до 600, 400, 200 та 100 авт./год. відповідно середній час затримки (для однакової інтенсивності руху ТЗ на прямому напрямку) майже не змінюється (tзатр =2…4 с);
2. При подальшому зростанні інтенсивності ТЗ на з’їздах до 900, 600, 300 та 200 авт./год. відповідно спостерігається різкий стрибок показників середнього часу затримок ТЗ (tзатр =11…13 с);
3. При подальшому зростанні інтенсивності руху ТЗ на з’їздах до 1000 авт./год. середній час затримки (для однакової інтенсивності руху ТЗ на прямому напрямку) майже не змінюється (tзатр =1…2 с);
при інтенсивності руху транспорту на прямому напрямку в межах 7000…10000 авт./год. середній час затримки ТЗ в залежності від інтенсивності руху ТЗ на з’їзді, також майже не змінюється (tзатр =2 с).
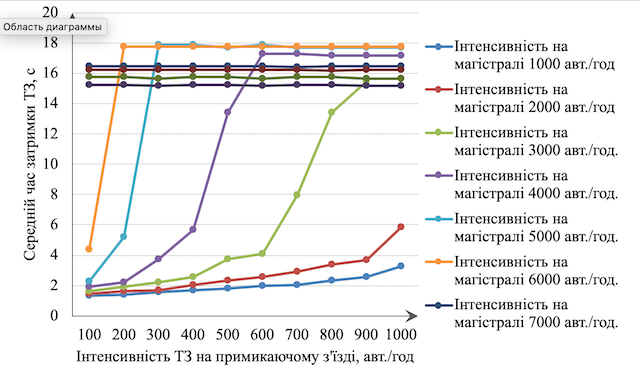 Рис. 6. Залежність середнього часу затримки ТЗ від інтенсивності при пріоритетному русі ТП по магістралі
Рис. 6. Залежність середнього часу затримки ТЗ від інтенсивності при пріоритетному русі ТП по магістралі
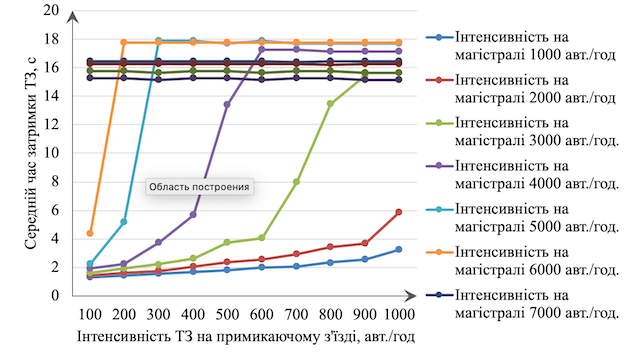 Рис. 7. Залежність середнього часу затримки ТЗ від інтенсивності при взаємному конфлікті ТП
Рис. 7. Залежність середнього часу затримки ТЗ від інтенсивності при взаємному конфлікті ТП
При взаємному конфлікті ТП встановлено, що:
- при інтенсивності руху транспорту на прямому напрямку в межах 1000 авт./год. середній час затримки ТЗ в залежності від інтенсивності руху ТЗ на з’їзді, майже не змінюється (tзатр =2 с);
- при інтенсивності руху транспорту на прямому напрямку в межах 2000…6000 авт./год. показник середнього часу затримки ТЗ в залежності від інтенсивності руху ТЗ на з’їзді характеризується трьома змінами:
1. При інтенсивності руху ТЗ на з’їздах до 900, 300, 100, 100 авт./год. відповідно середній час затримки (для однакової інтенсивності руху ТЗ на прямому напрямку) майже не змінюється (tзатр =2…3 с);
2. При подальшому зростанні інтенсивності ТЗ на з’їздах до 900, 600, 300 та 200 авт./год. відповідно спостерігається різкий стрибок показників середнього часу затримок ТЗ (tзатр =11…14 с);
3. При подальшому зростанні інтенсивності руху ТЗ на з’їздах до 1000 авт./год. середній час затримки (для однакової інтенсивності руху ТЗ на прямому напрямку) майже не змінюється (tзатр =1…2 с);
- при інтенсивності руху транспорту на прямому напрямку в межах 7000…10000 авт./год. середній час затримки ТЗ в залежності від інтенсивності руху ТЗ на з’їзді, також майже не змінюється (tзатр =2 с).
Висновок. Оцінка ефективності інженерно-планувальних елементів розв’язок в різних рівнях має здійснюватися на основі результатів транспортного моделювання. Одним із оціночних показників, який дозволяє отримати програмний комплекс PTV Vissim при моделюванні різноманітних дорожніх ситуацій є середній час затримки ТЗ.
В результаті проведеного експерименту встановлено, що в залежності від інтенсивності руху ТП на прямому і поворотному напрямках руху та пріоритетності проїзду конфліктної зони спостерігається значна розбіжність у показниках середнього часу затримки ТЗ. За одних і тих же вихідних умов взаємний конфлікт ТП у межах примикання лівоповоротних з’їздів до прямого магістрального напрямку призводить до зростання середнього часу затримки ТЗ на 2…25% в порівнянні з наданням пріоритету прямому магістральному напрямку. Зміна інтенсивності руху транспорту в межах з’їздів в межах 100…1000 авт./год. та незмінній інтенсивності руху ТП на прямому магістральному напрямку призводить до зростання середнього часу затримки ТЗ на 53…284%.
СПИСОК ВИКОРИСТАНОЇ ЛІТЕРАТУРИ
- Воробьев Э.М., Капський Д.В., Мосиенко Ю.И. Автоматизированные системы управления дорожним движением. Мн., 2005.
- Осетрін М.М. Міські дорожньо-транспортні споруди. Навчальний посібник для студентів ВНЗ. – К., ІЗМН, 1997. – 196с.
- Степанчук О.В. Основні види багаторівневих розв’язок вулично-дорожньої мережі та особливості руху транспорту / О.В. Степанчук, А.О. Прозоровська, Д.Б. Васюкович // Х Міжнародна наук.-техн. конф. «АВІА-2011», 19-21 квітня 2011 р., Київ: матеріали, конференції. – К.: НАУ, 2011. – С. 27-30.
- Видеман Р., Simulation des Straßenverkehrsflusses. Schriftenreihe des IfV, 8, 1974. Institut für Веркехрсвесен. Universität Карлсруэ.
- Видеман Р., Моделирование RTI-элементов на дорогах мультипереулка. В: Продвинутая Телематика в автомобильном транспорте, отредактированном Комиссией Европейского сообщества, DG XIII, Брюссель, 1991.
- Гибшман М.Е., Попов В.И. Проектирование транспортных сооружений: Учебник для вузов. – 2-е изд., перераб. и доп. – М.:Транспорт, 1988. – 447 с.
- Гохман В.А., Визгалов В.М., Поляков М.П. Пересечения и примыкания автомобильных дорог: Учеб. пособие для авт. дор. спец. вузов. 2-е изд., перераб. и доп. – М.: Высш. шк., 1989. – 319 с.
- Сильянов В.В. Теория транспортных потоков в проектировании дорог и организации движения. – М.: Транспорт, 1977. – 303 с.
- Дрю Д. Теория транспортных потоков и управления ими / Дрю Д. – М.: Транспорт, 1972. – 424 c.
- Тарасюк В.П. Принципи і методи оцінки впливу енерговитрат транспортного потоку при обґрунтуванні вибору інженерно-планувального рішення транспортно-планувальних вузлів (на прикладі м. Києва), : дис. канд. техн. наук: спец. 05.23.20 «Містобудування та територіальне планування» / Тарасюк В.П. – Київ, 2018. – 150 с.
- Клинковштейн Г.И. Организация дорожного движения / Г.И. Кли- нковштейн, М.Б. Афанасьев. – М.: Транспорт, 1992. – 207 с.
- Рэнкин В.У. Автомобильные перевозки и организация дорожного движения /В.У. Рэнкин,П. Клафи,С. Халберт и др. – М.: Транспорт, 1981. – 592 с.
- Системологія на транспорті. Організація дорожнього руху / Гаврилов Е.В., Дмитриченко М.Ф., Доля В.К. та ін.; під ред. М.Ф. Дмитриченка. – К.: Знання України, 2007. – 452 с.
- Коноплянко В.И. Организация и безопасность дорожного движения / В.И. Коноплянко – М.: Транспорт, 1991. – 183 с.
к.т.н., профессор Осетрин Н.Н., Беспалов Д.А.,
Дорош М.И., к.т.н. Тарасюк В.П.,
Киевский национальный университет строительства и архитектуры
ТРАНСПОРТНОЕ МОДЕЛИРОВАНИЕ КАК ОДИН ИЗ МЕТОДОВ ОЦЕНКИ ЭФФЕКТИВНОСТИ ИНЖЕНЕРНО-ПЛАНИРОВОЧНЫХ ЭЛЕМЕНТОВ РАЗВЯЗОК В РАЗНЫХ УРОВНЯХ
Статья направлена на ознакомление читателей с оценкой эффективности инженерно-планировочных элементов развязок в разных уровнях, а именно мест примыкания левоповоротных съездов к прямому магистральному направлению.
Соответствующая оценка осуществлена на примере наиболее распространенного типа развязок на улично-дорожной сети городов Украины – «клеверный лист».
Качество работы транспортных развязок во многом определяется эффективностью функционирования левоповоротных съездов и может быть определена на основе транспортного моделирования. В связи с этим для определения влияния распределения приоритетных направлений движения транспортных средств в пределах конфликтных зон мест примыкания левоповоротных съездов к прямым магистральным направлениям на среднее время задержки транспорта было использовано современное программное обеспечение для микромоделирования – PTV Vissim. Данный программный комплекс работает на основе психофизиологической модели Видемана, основанный на стохастическом распределении входного транспортного потока. Функционал комплекса дает возможность получить различные показатели как для всей развязки в целом, так и любого ее структурного элемента в отдельности.
В результате проведенного эксперимента установлено, что любой элемент развязки в разных уровнях, в том числе примыкания съезда к прямому магистральному направлению, имеет свою предельную пропускную способность, в результате исчерпания которой, среднее время задержки транспорта увеличивается до приближенного максимума и не уменьшается к разгрузке соответствующего элемента. При этом различные способы ограничения движения в конфликтных зонах (приоритет прямого магистрального направления или взаимный конфликт транспортных потоков) генерируют различные показатели среднего времени задержки в пределах развязки в разных уровнях.
Ключевые слова: транспортная развязка, элементы развязок в разных уровнях, транспортное моделирование, примыкания съездов, модель Видемана, PTV Vissim.
Ph.D., professor Osetrin N.N., V.P., Bespalov D.О.,
Dorosh M.I., Ph.D. Tarasiuk,
Kiev National University of Construction and Architecture
TRANSPORT MODELLING AS ONE OF METHODS FOR EVALUATION OF THE MULTILEVEL JUNCTIONS ENGINEERING PLANNING ELEMENTS EFFICIENCY
The article is aimed at familiarizing readers with the assessment of the efficiency engineering and planning elements of a junction in different levels, namely, the places of adjunction left-turning ramps to the direct main direction. The corresponding estimation is carried out on an example of the most widespread type of interchanges on a street and road network of Ukrainian cities – “cloverleaf”.
The quality of work of transport interchanges is largely determined by the efficiency of the functioning left-turning ramps and can be determined based on transport modelling. In this regard, to determine the impact of the distribution of priority directions movement of vehicles within the conflict zones the connection of the place left-turning ramps to the direct main directions for the average delay time of transport was used modern software for micro modelling – PTV Vissim. This software works based on Videmann psychophysiological model based on the stochastic distribution of the input transport flow. The functionality of the complex makes it possible to obtain various indicators for the whole junction as well as for any of its structural elements separately.
As a result of the experiment, it was established that any element of the interchange in different levels, including the connection of the exit to the direct mainline direction, has its maximum capacity, as a result of exhaustion of which, the average time of delay of transport increases to the approximate maximum and does not decrease to the unloading of the corresponding element. At the same time, different methods of traffic restriction in conflict zones (priority of the direct mainline direction or mutual conflict of traffic flows) generate different indicators of the average delay time within the limits of the junction in different levels.
Keywords: road junction, junction elements in different levels, transport modeling, adjunction of ramps, Weidman model, PTV Vissim.
REFERENCES
- Vorobiov E.M., Kapskii D.V., Mosiienko Yu.I. Avtomatyzovani systemy upravlinnia dorozhnim rukhom. Mn., 2005.
- Osetrin M.M. Miski dorozhno-transportni sporudy. Navchalnyi posibnyk dlia studentiv VNZ. – K., IZMN, 1997 – 196 s.
- Stepanchuk O.V. Osnovni vydy bahatorivnevykh rozviazok vulychno-dorozhnoi merezhi ta osoblyvosti rukhu transportu / O.V. Stepanchuk, A.O. Prozorovska, D.B. Vasiukovych // Kh Mizhnarodna nauk.-tekhn. konf. «AVIA-2011», 19-21 kvitnia 2011 r., Kyiv: materialy, konferentsii. – K.: NAU, 2011. – S. 27-30.
- Wiedemann R., Simulation des Straßenverkehrsflusses. Schriftenreihe des IfV, 8, 1974. Institut für Verkehrswesen. Universität Karlsruhe.
- Vydeman R., Modeliuvannia RTI-elementiv na dorohakh multipereulka. V: Prosunuta Telematyka v avtomobilnomu transporti, vidredahovanomu Komisiieiu Yevropeiskoho spivtovarystva, DG XIII, Briussel, 1991.
- Hybshman M.Ie., Popov V.I. Proektuvannia transportnykh sporud: Pidruchnyk dlia vuziv. – 2-e yzd., Pererab. i dop. – M.: Transport, 1988. – 447 s.
- Hokhman V.A., Vizghalov V.M., Poliakov M.P. Peretyny i prymykannia avtomobilnykh dorih: Navch. posibnyk dlia avt. dor. spets. vuziv. 2-e yzd., Pererab. i dop. – M.: Vyshcha. shk., 1989. – 319 s.
- Silianov V.V. Teoriia transportnykh potokiv v proektuvanni dorih i orhanizatsii rukhu. – M.: Transport, 1977. – 303 s.
- Driu D. Teoriia transportnykh potokiv i upravlinnia nymy / Driu D. – M.: Transport, 1972. – 424 s.
- Tarasiuk V.P. Pryntsypy i metody otsinky vplyvu enerhovytrat transportnoho potoku pry obgruntuvanni vyboru inzhenerno-planuvalnoho rishennia transportno-planuvalnykh vuzliv (na prykladi m. Kyieva): dys. kand. tekhn. nauk: spets. 05.23.20 «Mistobuduvannia ta terytorialne planuvannia» / Tarasiuk V.P. – Kyiv, 2018. – 150 s.
- Klynkovshtein H.I. Orhanizatsiia dorozhnoho rukhu / H.I. Kli- nkovshtein, M.B. Afanasiev. – M.: Transport, 1992. – 207 s.
- Renkin V.U. Avtomobilni perevezennia i orhanizatsiia dorozhnoho rukhu /V.U. Renkin, P. Klaf, S. Khalbert i in. – M.: Transport, 1981. – 592 s.
- Systemolohiia na transporti. Orhanizatsiia dorozhnoho rukhu / Havrylov E.V., Dmytrychenko M.F., Dolia V.K. ta in.; pid red. M.F. Dmytrychenka. – K.: Znannia Ukrainy, 2007. – 452 s.
- Konoplianka V.I. Orhanizatsiia ta bezpeka dorozhnoho rukhu / V.I. Konoplianka – M.: Transport, 1991. – 183 s.

У вас однаковий графік на Рис. 6 та 7