
УДК 62-503.57; 519.876.5; 656.051
DOI: 10.15587/2312-8372.2014.28095
У статті розглядаються адаптивні алгоритми, що забезпечують пріоритет на регульованому перехресті, і з використанням програмного забезпечення VISSIM, визначається їх ефективність при різних умовах руху на підходах до нього. Порівнюється ефективність застосування про сторовочасового пріоритету і пріоритету у часі. Встановлюється найефективніша область застосування методу «спеціальна смуга у зоні перехрестя».
Ключові слова: алгоритм, що забезпечує пріоритет, спеціальна смуга, автобус, регульоване перехрестя.
1. Вступ
Сьогодні в українських містах найпоширенішими видами пасажирського транспорту для перевезення міського населення є маршрутні автобуси (тролейбуси). Одним із основних чинників підвищення їх транспортного обслуговування на вулично-дорожній мережі міста є забезпечення пріоритетних умов руху на регульованих перехрестях, оскільки саме на них виникають найбільші їх затримки. До умов, в яких складно забезпечити просторовочасовий пріоритет, де пріоритет у просторі реалізується через виділення спеціальних смуг на перегонах вулиць не перериваючи їх на перехрестях, відносять регульовані перехрестя, підходи яких мають не більше двох смуг руху в одному напрямку.
2. Постановка проблеми
Для забезпечення пріоритету у таких умовах в [1] пропонується метод «спеціальна смуга в зоні перехрестя». Суть цього методу полягає у створенні просторового «коридору» в зоні перехрестя (на підході до нього і за ним) з додаткових поширень та облаштування на них, включаючи ділянку на площі перетину, спеціальної смуги для руху пріоритетного транспорту. В [1], також, запропоновано шість основних типів спеціальних смуг, що впро- ваджуються в зоні перехрестя, які, при цьому, належать до однієї із двох груп. До першої групи віднесено ті, які доцільно впроваджувати на перехрестях де зупинні пункти відсутні або розташовані перед ним (додаткові поширення впроваджуються лише на підходах до перехрестя), а до другої — де зупинні пункти розташовані після перехрестя (додаткові поширення впроваджуються як на підходах до пересічення, так і за ним).
Пріоритетний проїзд площі перехрестя або пріоритет у часі забезпечується за допомогою жорстких і адаптивних алгоритмів керування світлофорної сигналізації. З усіх жорстких алгоритмів, які можуть доповнювати метод «спеціальна смуга у зоні перехрестя» в части- ні забезпечення пріоритету у часі, є введення окремої спеціальної фази для автобусів [2–4]. Тривалість цієї фази і доцільність її введення, залежить від середньої кількості автобусів, що прибуває до перехрестя за цикл. Тому є ефективною при значній їх інтенсивності і лише для спеціальних смуг другої групи, тобто коли зупинки розташовані за перехрестям.
Серед адаптивних алгоритмів, які можуть доповнювати цей метод, є три алгоритми, які широко застосовуються на практиці, зокрема продовження дозволеного сигналу при появі автобуса на підході до перехрестя, продовження дозволеного сигналу та дострокове закін- чення забороненого на конфліктному напрямку, а також виклик спеціальної фази [5].
Перші два алгоритми є придатними тільки для спеціальних смуг другої групи у випадках, коли автобуси і непріоритетні потоки здійснюють проїзд перехрестя без конфліктів в одній фазі. Або, коли спеціальні смуги мають комбіноване використання з транспортними засобами, що повертають праворуч. Також в умовах, де крім спеціальної смуги, що впроваджена в зоні пе- рехрестя наявні ще три смуги в одному напрямку для непріоритетних потоків, і є можливість здійснювати керування рухом за окремими напрямками.
Алгоритм керування, що базується на виклику спеціальної фази, дозволяє забезпечити абсолютний і умовний пріоритет для усіх типів спеціальних смуг, що впроваджуються в зоні перехрестя.
3. Аналіз досліджень і публікацій
Ефективність функціонування спеціальної смуги у зоні перехрестя де пріоритет у часі забезпечуватиметься через виклик спеціальної фази, залежить від умов руху на кожному підході та інтервалу руху між автобусами, що прибувають до перехрестя. Пояснюється це тим, що з використання цього алгоритму, як зазначається у [6], можна досягти найкращих результатів щодо забезпечення пріоритетного проїзду перехресть, проте, одночасно, це може створювати проблеми для інших учасників дорожнього руху.
Дослідження, які проводилися щодо цього алгоритму, здебільшого, були направлені на визначення його ефективності на перехрестях при конкретних умовах руху [6, 7]. Однак, немає, насамперед, кількісної оцінки ефективності цього алгоритму при різних умовах руху на пересіченні.
З цих причин слід оцінити ефективність алгоритму виклику спеціальної фази в комбінації із спеціальною смугою у зоні перехрестя, тобто забезпечення просторово-часового пріоритету при різних умовах руху та різних інтервалах між автобусами, що прибувають до перехрестя. Паралельно з цим, при тому ж діапазоні умов руху на перехресті, необхідно оцінити ефективність алгоритму продовження дозволеного сигналу та дострокового завершення забороненого і алгоритму продовження дозволеного сигналу в умовах відсутності спеціальної смуги у зоні перехрестя, тобто забезпечення пріоритету у часі. Це дасть змогу порівняти ефективність застосування просторово-часового пріоритету і пріоритету у часі при різних умовах руху, з’ясувати чи при усіх умовах руху на перехресті є доцільним застосовувати саме просторово-часовий пріоритет, який реалізується за допомогою методу «спеціальна смуга у зоні перехрестя», а також встановити область найефективнішого його застосування.
4. Мета та завдання дослідження
Мета статті — визначити ефективність методу «спеціальна смуга на перехресті» з точки зору забезпечення пріоритету у часі при різних умовах руху на ізольованому регульованому перехресті. Для досягнення цієї мети у роботі вирішуються такі завдання:
— визначення та порівняння ефективності адаптивних алгоритмів, що забезпечують пріоритет з використання програмного забезпечення VISSIM;
— встановлення найефективнішої області застосування методу «спеціальна смуга у зоні перехрестя».
5. Визначення ефективності адаптивних алгоритмів, що забезпечують пріоритет
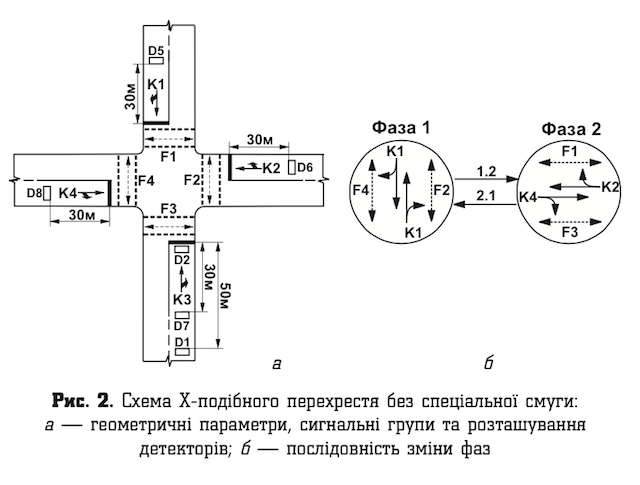
Для дослідження ефективності алгоритмів при різних умовах руху використовується програмне забезпечення VISSIM, в якому створено моделі двох окремих Х-подібних ізольованих регульованих пересічень з однією смугою руху на усіх підходах в обох напрямках. У зоні першого — впроваджена спеціальна смуга для автобусів типу 2.1 [1]. ЇЇ довжина на підході до стоп-лінії становить 150 м. Для спрощення масштабів дослідження прийнято, що на обох перехрестях відсутні лівоповоротні потоки.
Схеми геометричних параметрів перехресть з розподілом множини існуючих напрямків на сигнальні групи та розташування детекторів наведено на рис. 1, а та 2, а. Сигнальним групам для транспортних потоків присвоєно назви К1, К2, К3, К4; для пішохідних — F1, F2, F3, F4; для автобусів, що рухаються виділеною смугою — В1. Поєднання сигнальних груп у фази та послідовність їх чергування наведено на рис. 1, б та 2, б.
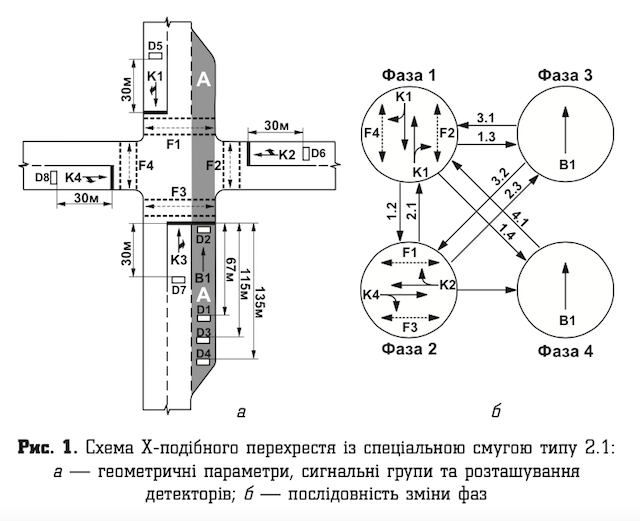
Правоповоротні транспортні потоки конфліктують з пішоходами, інтенсивність яких у кожній сигнальній групі не перевищує 50 піш./год.
У моделі прийнято, що бажана швидкість легкового і вантажного автомобіля становить 50 км/год., а автобуса — 40 км/год. Частка легкових автомобілів у потоці на усіх підходах (не враховуючи автобусів) становить 95 %, а частка потоку прямого напрямку — 85 %.
Для реалізації у моделі VISSIM адаптивного керування світлофорною сигналізацією використовується його додатковий модуль VAP. Моделювання роботи перехрестя з використанням цього модуля вимагає створення VAP-фалу, який описує логіку керування та PUA-фалу, в якому визначено сигнальні групи, їх поєднання у фази та тривалість перехідних інтервалів.
Файл-PUA для кожного алгоритму створюється у програмі WordPad, при цьому тривалість проміжних тактів у всіх випадках приймається 3 с. Логіка керування алгоритмів розробляється в окремому програмному модулі VisVAP у формі блок-схем, після чого перетворюються у файли-VAP та обидва файли (PUA та VAP) імпортуються у VISSIM.
Блок-схема алгоритму забезпечення пріоритету, що базується на виклику спеціальної фази, наведено на рис. 3. Вона створена на основі таких умов [8, 9]:
1) часові умови керування:
— Т1 = 7 с — мінімальна тривалість дозволеного сигналу фази 1;
— Т2 = 31 с — максимальна тривалість дозволеного сигналу фази 1;
— Т3 = 9 с — мінімальна тривалість дозволенного сигналу фази 2;
— Т4 = 17 с — максимальна тривалість дозволенного сигналу фази 2;
— Т5 = 5 с — мінімальна тривалість дозволеного сигналу фази 3 і 4;
— Т6 = 10 с — максимальна тривалість дозволеного сигналу фази 3 і 4;
2) логічні умови керування:
— W1 — детектор D3 зафіксував появу автобуса або завантаження детектора D2 від появи автобуса є не менше 1 с;
— W2 — детектор D4 зафіксував появу автобуса або завантаження детектора D2 від появи автобуса є не менше 1 с;
— L1 — автобус був виявлений на детекторі D1 впродовж поточного часового кроку моделювання; — G57 — детектори D5 та D7 зафіксували часовий розрив у транспортному потоці сигнальних груп K1 та K3;
— G68 — детектори D6 та D8 зафіксували часовий розрив у транспортному потоці сигнальних груп K2 та K4;
— NP1 — на детекторі D1 не виявлено автобуса і завантаження детектора D2 від появи автобуса є менше 1 с;
— DL34 — очищує пам’ять детекторів D3 та D4; 3) інші умови керування:
— PT: = 0 — перехід до фази 1;
— PT: = 1 — перехід до фази 2;
— IS — виконує перехід до перехідних інтервалів (наприклад, IS 1.2 — виконується перехід з фази 1 у фазу 2).

Блок-схеми алгоритму продовження дозволеного сигналу та дострокового закінчення забороненого і алгоритму продовження дозволеного сигналу наведені відповідно на рис. 4 та 5. Обидві блок-схеми створені на основі таких умов:
1) часові умови керування:
— Т1 = 7 с — мінімальна тривалість дозволеного сигналу фази 1;
— Т2 = 31 с — максимальна тривалість дозволеного сигналу фази 1;
— Т3 = 7 с — мінімальна тривалість дозволенного сигналу фази 2;
— Т4 = 17 с — максимальна тривалість дозволенного сигналу фази 2;
2) логічні умови керування:
— F1 — детектор D1 зафіксував появу автобуса; — NL2 — на детекторі D2 не виявлено автобуса впродовж поточного часового кроку моделювання; — G57 — детектори D5 та D7 зафіксували часовий розрив у транспортному потоці сигнальних груп K1 та K3;
— G68 — детектори D6 та D8 зафіксували часовий розрив у транспортному потоці сигнальних груп K2 та K4;
— DL1 — очищує пам’ять детектора D1;
3) інші умови керування:
— PT:=0—перехіддофази1;
— PT:=1—перехіддофази2;
— IS — виконує перехід до перехідних інтервалів (наприклад, IS 1.2 — виконується перехід з фази 1 у фазу 2).

Для ефективного керування світлофорною сигналізацією на перехрестях, усі три алгоритми, що забезпечують пріоритет, одночасно, поєднуються із алгоритмом пошуку часового розриву у транспортному потоці. Більше того, алгоритм виклику спеціальної фази, також, ще поєднується із алгоритмом зміни чергування фаз. Реалізація комбінацій цих алгоритмів у логіці керування здійснюється в тому числі і за допомогою детекторів транспорту. Для виявлення появи автобуса на спеціальній смузі (блок-схема на рис. 3) використовуються детектори D1, D2, D3 і D4, а для виявлення часового розриву у транспортному потоці на усіх підходах — детектори D5, D6, D7 і D8. Аналогічна ситуація з детекторами, що використовуються у блок-схемах на рис. 4 і 5. Зокрема, щоб виявити часовий розрив у потоці, використовують детектори D5, D6, D7 і D8, а для виявлення появи автобуса — детектори D1 та D2.

У блок-схемі алгоритму виклику спеціальної фази використовується одна і таж автобусна сигнальна група В1 у двох різних фазах (фаза 3 і фаза 4). Це дає змогу забезпечити різну тривалість перехідних інтервалів між фазою, що викликається та іншою фазою (або навпаки). В свою чергу це дозволяє реалізувати абсолютний пріоритет проїзду автобусів через перехрестя.
Щоб встановити ефективність алгоритмів при різних умовах руху на перехресті, у моделі змінюється вхідна інтенсивність транспортного потоку відповідно до ступеня насичення, який кількісно характеризує зміну умов руху. При ступені насичення кожного підходу 0,65; 0,8; 0,95; 1,10 вхідна інтенсивність транспортного потоку сигнальних груп К1 та К3 відповідно набуває значень 625, 770, 914, 1058 авто/год., а сигнальних груп К2 і К4 — 343, 422, 501, 580 авто/год. Паралельно з цим, у моделі змінюється інтервал руху між автобусами, що прибувають до перехрестя і набуває таких значень: 960, 480, 240, 120, 60, 30 с.
В якості критерію, для кількісної оцінки ефективності алгоритмів, використовується показник середня затримка автобуса на підході та середня затримка автомобіля на перехресті (визначається як середньозважене значення затримок усіх підходів).
Загалом у дослідженні проводиться 24 виміри. Щоб усереднити результати для кожного виміру проводиться по 3 імітації, де тривалість однієї складає 1 год., при чому початок фіксування результатів розпочинався з 400 с.
За результатами моделювання було отримано значення середньої затримки автобуса та автомобіля на підході, і розраховано — автомобіля на перехресті, а також встановлено їх залежності від інтервалу руху автобуса та ступеня насичення на підходах при різних алгоритмах забезпечення пріоритету (рис. 6).
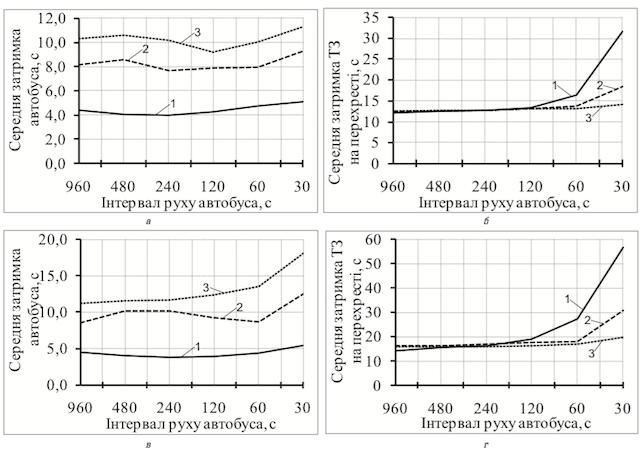

Як видно з рис. 6, значення середньої затримки автобуса при алгоритмі виклику спеціальної фази в комбінації із спеціальною смугою у зоні перехрестя (просторово-часовий пріоритет), практично, не змінюються при різних умовах руху на перехресті та інтервалах руху між автобусами, і лежать у межах 3,29–5,41 с. А значення затримок при алгоритмі продовження дозволеного сигналу та дострокового завершення забороненого і алгоритмі продовження дозволеного сигналу, зростають із збільшенням насичення руху на перехресті (з 8,2 та 10,2 с до 23,7 та 28,5 с відповідно при ступені насичення 0,65 та 1,10). Водночас, значення середньої затримки автобуса при алгоритмі продовження дозволеного сигналу є більшими ніж при алгоритмі продовження дозволеного сигналу та дострокового завершення забороненого при усіх умовах руху на перехресті (розбіжність становить 2 та 5 с відповідно при ступені насичення 0,65 та 1,10). Хоча при перенасичених умовах руху на перехресті (сту- пінь насичення 1,11) та при великих інтервалах руху (не менше 480 с) ці значення майже збігаються.
Розбіжність значень середньої затримки автобуса при просторово-часовому пріоритеті і пріоритеті у часі становить від 4,8 до 21,9 с відповідно при ступенях насичення 0,65 та 1,11.
Значення середньої затримки автомобіля на перехресті, зростають із збільшенням ступеня насичення та зменшенні інтервалу руху між автобусами при усіх алгоритмах, що розглядаються. При цьому, якщо інтервал руху між автобусами є більше 120 с, то значення затримок, при усіх трьох алгоритмах, практично, збігаються. Якщо ж інтервал є менше 120 с, то значення затримок відрізняються між собою і стрімко збільшуються із зменшенням інтервалу між автобусами. Найбільші значення затримок є при алгоритмі виклику спеціальної фази (31,47–83,99 с), а найменші — при алгоритмі продовження дозволеного сигналу (14,15–37,22). Така ситуація спостерігається при різних ступенях насичення на перехресті.
Для того щоб з отриманих результатів, що наведені на рис. 6 визначити найефективнішу область застосування алгоритму виклику спеціальної фази в комбінації із спеціальною смугою у зоні перехрестя, що дає змогу забезпечувати просторово-часовий пріоритет, доцільно використовувати не значення середньої затримки автомобіля на перехресті, а величину затримок на кожному підході. Це дозволить детальніше врахувати ті умови руху, при яких величина затримки перевищує граничні межі. В якості граничного значення слід використовувати 80 с, яке рекомендується у [10].
Усереднюючи найбільші значення середньої затримки на двох підходах перехрестя, визначено залежність середньої затримки автомобіля на підході від інтервалу руху між автобусами при різних ступенях насичення (рис. 7). Для виявлення області ефективності, з цими результатами, також, наведено граничну межу значень середньої затримки у вигляді суцільної лінії.

Враховуючи результати, що наведені на рис. 7 та проводячи на основі них регресійний аналіз, встановлено, що при граничній межі нормальних умовах руху на кожному підході (ступінь насичення 0,95 [8, 9]) та при граничній межі значень середньої затримки (80 с), інтервал руху між автобусами не повинен бути меншим за 57 с. З іншого боку, наприклад, при інтервалі між автобусами 30 с, ступінь насичення на кожному підході до перехрестя не повинен перевищувати 0,85.
6. Апробація результатів дослідження
Дослідження у цій роботі направленні на визначення та порівняння ефективності застосування просторово-часового пріоритету і пріоритету у часі при різних умовах руху на ізольованому перехресті з однією сугою руху на усіх підходах. Просторово-часовий пріоритет представлений методом «спеціальна смуга у зоні перехрестя», який, у даному випадку, є комбінацією спеціальної смугу у зоні перехрестя та алгоритму виклику спеціальної фази, а пріоритет у часі реалізується за допомогою алгоритму продовження дозволеного сигналу та дострокового закінчення забороненого і алгоритму продовження дозволеного сигналу.
Науковою новизною роботи є встановлення найефективнішої області застосування методу «спеціальна смуга у зоні перехрестя», що відповідає умовам руху, при яких ступінь насичення рухом на підходах до перехрестя не перевищує 0,95, а інтервал руху між автобусами є не меншим за 57 с. Ці результати дозволяють інженерам легко встановлювати можливість застосування на пере- хресті методу «спеціальна смуга у зоні перехрестя» де пріоритет у часі реалізується за допомогою адаптивного алгоритму виклику спеціальної фази.
7. Висновки
1. Виклик спеціальної фази є основним адаптивним алгоритмом, який доцільно використовувати для доповнення методу «спеціальна смуга у зоні перехрестя» в частині забезпечення пріоритету у часі.
2. Зміна умов руху на перехресті, практично, не впливає на середню затримку автобуса при алгоритмі виклику спеціальної фази в комбінації із спеціальною смугою у зоні перехрестя (лежать у межах 3,29–5,41 с). Однак це проявляється на середній затримці автомобіля на перехресті, значення якого зростають із збільшенням ступеня насичення руху на підході та зменшенні інтервалу руху між автобусами.
3. Розбіжність значень середньої затримки автобуса при просторово-часовому пріоритеті і пріоритеті у часі становить від 4,8 до 21,9 с відповідно при ступенях насичення 0,65 та 1,11.
4. Найефективніша область застосування методу «спеціальна смуга у зоні перехрестя» відповідає умовам, коли ступінь насичення рухом на підходах до перехрестя не перевищує 0,95 та інтервал руху між автобусами є не меншим за 57 с.
Література
1. Вікович,І.А.Розробка методу забезпечення пріоритету маршрутним автобусам на регульованих перехрестях [Текст] / І. А. Вікович, Р. М. Зубачик // Східно-Європейський журнал передових технологій. — 2013. — No 5/3(65). — С. 27–33. — Режим доступу: \www/ URL: http://journals.uran.ua/eejet/ article/view/ 18491.
2. Клинковштейн, Г. И. Организация дорожного движения [Текст]: учеб. для вузов / Г. И. Клинковштейн, М. Б. Афанасьев. — М.: Транспорт, 2001. — 5-е изд. — 247 с.
3. Кременец, Ю. А. Технические средства организации дорожного движения [Текст]: учеб. для вузов / Ю. А. Кременец, М. П. Печерский, М. Б. Афанасьев. — М.: ИКЦ «Академ- книга», 2005. — 279 с.
4. Гаврилов, Е. В. Організація дорожнього руху [Текст] / Е. В. Гаврилов, М. Ф. Дмитриченко, В. К. Доля. — К.: Знання України, 2007. — 452 с.
5. Шелков, Ю. Д. Организация дорожного движения в городах [Текст]: метод. пос. / Ю. Д. Шелков. — М.: Научно-исследовательский центр ГАИ МВД России, 1995. — 143 с.
6. Пржибыл, П.Телематика на транспорте [Текст]: пер.с чешского / П. Пржибыл, М. Свитек. — Москва: МАДИ, 2003. — 540 с.
7. Bus rapid transit Planning guide [Text]. — Ed. 3. — New York, June 2007. — 825 р.
8. Handbuch f r die Bemessung von Stra enverkehrsanlagen [Text] /Forschungsgesellschaft f r Straen und Verkehrswesen e.V. — FGSV Verlag GmbH, K ln, 2001. — 390 p.
9. Scnabel, W. Grundlagen der Straenverkehrstechik und der Verkehrsplanung [Text]]. Band 1: Stra enverkehrstechnik / W. Scnabel. — 2. Auflage. — Berlin: Verlag fur Beuwesen GmbH, 1997. — 590 p.
10. Highway Capacity Manual [Text]. — TRB, Washington, DC, 2000. — 1134 p.
ОПРЕДЕЛЕНИЕ ЭФФЕКТИВНОСТИ МЕТОДА «СПЕЦИАЛЬНАЯ ПОЛОСА В ЗОНЕ ПЕРЕКРЕСТКА» С ПОЗИЦИИ ОБЕСПЕЧЕНИЯ ПРИОРИТЕТА ВО ВРЕМЕНИ
В статье рассматриваются адаптивные алгоритмы, обеспечивающие приоритет на регулируемом перекрестке, и с использованием программного обеспечения VISSIM, определяется их эффективность при различных условиях движения на подходах к нему. Сравнивается эффективность применения пространственно-временного приоритета и приоритета во времени. Устанавливается эффективная область применения метода «специальная полоса в зоне перекрестка».
Ключевые слова: алгоритм, обеспечивающий приоритет, специальная полоса, автобус, регулируемый перекресток.
Вікович Ігор Андрійович, доктор технічних наук, професор, кафедра транспортних технологій, Національний університет «Львівська політехніка», Україна, е-mail: ihor.vikovych@gmail.com.
Зубачик Роман Михайлович, аспірант, кафедра транспортних технологій, Національний університет «Львівська політехніка», Україна, е-mail: roman.zubachyk@gmail.com.
Беспалов Дмитро Олександрович, асистент, кафедра міського будівництва, Київський національний університет будівництва і архітектури, Україна.
Викович Игорь Андреевич, доктор технических наук, профессор, кафедра транспортных технологий, Национальный университет «Львовская политехника», Украина.
Зубачик Роман Михайлович, аспирант, кафедра транспортных технологий, Национальный университет «Львовская политехника», Украина.
Беспалов Дмитрий Александрович, ассистент, кафедра городского строительства, Киевский национальный университет строительства и архитектуры, Украина.
Vikovych Іhor, Lviv National Polytechnic University, Ukraine, е-mail: ihor.vikovych@gmail.com.
Zubachyk Roman, Lviv National Polytechnic University, Ukraine, е-mail: roman.zubachyk@gmail.com.
Bespalov Dmytro, Kyiv National University of Construction and Architecture, Ukraine
Ориінал статті за посиланням.
